Thiết kế thành công cánh tay robot phẫu thuật, rà phá bom mìn từ xa
Sau khi đã thiết kế và chạy thử, hoàn thiện lại các giải thuật điều khiển, kết quả thử nghiệm thực tế của cánh tay robot hết sức ấn tượng.
Sở Khoa học và Công nghệ (KH&CN) TP.HCM nghiệm thu đề tài "Nghiên cứu thiết kế chế tạo mô hình tay máy sao chép chuyển động và phản hồi lực" do ThS Nguyễn Ngọc Điệp, giảng viên khoa Công nghệ cơ khí thuộc Trường ĐH Công nghiệp TP.HCM, làm chủ nhiệm.
Các vấn đề của cánh tay robot
Một trong những nội dung quan trọng trong buổi nghiệm thu đề tài là khả năng điều khiển từ xa của cánh tay robot này. Hay nói cách khác làm sao đồng bộ được "cảm giác" của cánh tay robot thứ cấp (slave, tương tác trực tiếp với đối tượng) với cánh tay sơ cấp (master, do người điều khiển).
 |
| Các vấn đề của cánh tay robot |
Điều khiển từ xa (remote control) là một phận không thể thiếu trong Công nghiệp 4.0. Theo đó, các công nhân hoặc kỹ sư không cần phải trực tiếp tương tác với dây chuyền sản xuất mà có thể ở cách xa đấy hàng chục, hàng trăm mét điều khiển thiết bị.
Mục đích của việc này ngoài việc tiết kiệm chi phí, thời gian đi lại, còn góp phần giảm thiểu các rủi ro cho người sản xuất nếu môi trường làm việc mang tính nguy hại cao (có độc chất, phóng xạ, an toàn lao động không đảm bảo...).
Hiện nay điều khiển từ xa đã được áp dụng trong khá nhiều lĩnh vực như phẫu thuật từ xa, công binh rà phá bom mìn... và thậm chí cả điều khiển robot nghiên cứu sao Hỏa.
Tuy vậy, để có thể điều khiển từ xa được chính xác, thao tác đúng như mong muốn của người điều khiển là chuyện không đơn giản. Nếu người điều khiển không biết được cánh tay slave đang bị quá tải lực mà vẫn tiếp tục ra lệnh ấn xuống, có thể khiến cho cánh tay slave bị hư hỏng.
Bên cạnh đó, độ trễ của tín hiệu, độ sai lệch về moment, dự ứng lực... đều phải ở mức thấp nhất.
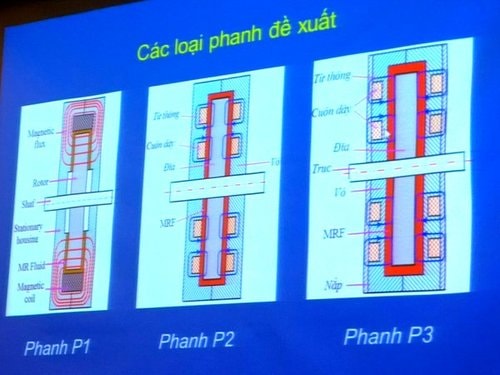 |
| Cấu tạo 3 mẫu phanh MRF của ThS Điệp. |
Để giải quyết các vấn đề đã nêu, một hệ thống phanh dùng để kiểm soát cử động ở từng cánh tay chính là câu trả lời. Đây cũng là nội dung chính của đề tài nghiên cứu mà ThS Điệp đặt ra để giải quyết - nghiên cứu, thiết kế và chế tạo loại phanh phù hợp để dùng làm cánh tay robot.
Giải pháp phanh ThS Điệp lựa chọn có tên MRF. MRF (Magnetorheological fluid), là một loại chất lỏng đặc biệt, có độ nhớt thay đổi khi có sự thay đổi về từ trường đi ngang qua nó. Ở cường độ từ trường vừa đủ, MRF gần như hóa rắn và có thể dùng như một loại phanh cho các chi tiết cơ khí.
Theo đề xuất của ThS Điệp, có 3 mẫu phanh MRF có thể dùng để làm cánh tay robot gồm phanh P1, P2 và P3. Trong đó, P1 có 1 cuộn dây từ nằm ở đỉnh đĩa phanh, P2 có cuộn dây đặt bên trong 2 bên hông đĩa, P3 có cuộn dây đặt bên ngoài 2 bên hông đĩa.
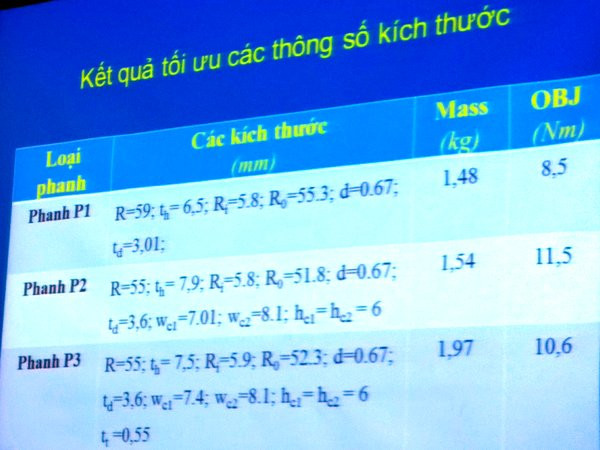 |
| Phanh P2 và P3 có hiệu suất tốt nhất, đáp ứng được mục tiêu thiết kế (> 10 Nm). |
Kết quả mô phỏng trên máy tính cũng như ngoài thực nghiệm của ThS Điệp cho thấy, phanh P1 đang có trên thị trường tuy nhẹ nhưng hiệu suất (Nm) thấp nhất. 2 mẫu P2 và P3 tuy nặng hơn nhưng cho hiệu suất đáp ứng được với nhu cầu thực tế.
Một điểm lưu ý là phanh P2 tuy có hệ số hiệu suất/khối lượng tốt nhất nhưng do cuộn dây nằm bên trong nên sẽ phức tạp hơn khi sửa chữa, bảo trì. Do vậy, ThS Điệp chọn phanh P3 vì cân bằng được giữa chi phí và hiệu suất.
Thiết kế và chế tạo
Chọn phanh nào chỉ là phần đầu của bài toán. Vấn đề đặt ra kế tiếp là thiết kế cánh tay robot ra sao, chọn loại vật liệu gì, cảm biến góc, cảm biến moment, chip điều khiển... ThS Điệp cho biết, hệ cánh tay robot master-slave là hệ 3 bậc tự do (3 trục xoay), có tải trọng tối đa 2,5 kg. Trong đó, tay slave có tầm hoạt động góc trục 1 từ 0 - 270°, góc trục 2 từ 0 - 100° và góc trục 3 từ 0 - 180°, tầm với tối đa 0,7 mét, vận tốc cực đại ở điểm cuối 0,5 m/s.
Để tiết kiệm chi phí, cánh tay master được tận dụng lại từ "xác" cánh tay Fanuc LR 100i. ThS cho biết chỉ có phần vỏ master là "dùng lại", các thành phần còn lại (cảm biến, phanh, encoder) đều do nhóm nghiên cứu thiết kế và gắn mới lên.
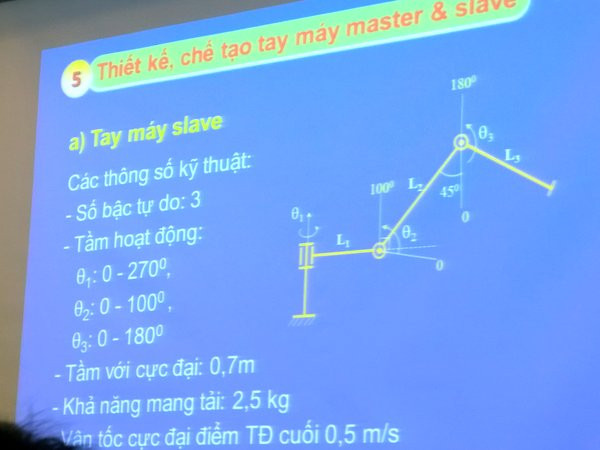 |
| Cấu tạo cánh tay robot slave của ThS Điệp |
Sau cùng, cần có một hệ thống điều khiển "thông ngôn" cho 2 cánh tay "hiểu được nhau". Hệ thống là nhóm nghiên cứu của ThS Điệp đưa ra gồm 3 encoder đo góc LBJ-096-2000, 2 cảm biến lực 3 chiều OMD 30EF và 3 cảm biến moment xoắn AZM 350. Hệ thống còn có 3 bộ thiết bị điều khiển phanh, 3 động cơ HC-KFS 23 làm động cơ AC servo và các card điều khiển NI PCI 6289, 6225 để đo tín hiệu vào/ra ở từng cánh tay.
Kết quả ấn tượng
Sau khi đã thiết kế và chạy thử, hoàn thiện lại các giải thuật điều khiển, kết quả thử nghiệm thực tế của cánh tay robot hết sức ấn tượng.
Hội đồng nghiệm thu đề tài của Sở KH&CN đã được tận mắt chứng kiến khả năng vận hành gần như không có trục trặc nào của bộ đôi cánh tay trên.
 |
 |
Các cử động do người điều khiển ở cánh tay slave được tái hiện đúng trên cánh tay master. Thử nghiệm về "cảm giác" độ căng cũng được diễn ra với lò xo mô phỏng được gắn ở cả 3 phương ngang dọc và chéo.
Có thể nói, nhóm của ThS Điệp đã hoàn toàn thành công trong việc chế tạo cánh tay robot bậc 3 trong việc phản hồi lực.
 |
| Thực nghiệm phản hồi lực ở cả 3 phương ngang, dọc và chéo đều cho kết quả tốt. |
Trong mục tiêu xa hơn, ThS Điệp kiến nghị Sở KH&CN cho phép nhóm tăng số bậc tự do lên cấp 5 (DOF), cho phép cánh tay thực hiện được nhiều thao tác vận hành phức tạp hơn.
Nhóm cũng hy vọng sẽ nhận được thêm nhiều đầu tư để áp dụng các giải thuật thông minh hơn, bổ sung bộ phản hồi chủ động, kết hợp MRF với các thiết bị phản hồi bằng khí nén, nhằm tăng cường khả năng ứng dụng hơn nữa. Đặc biệt trong lĩnh vực y học vốn cần tới khả năng mô phỏng cảm giác da thịt bệnh nhân gần như thật.
Theo Khám phá
| TIN LIÊN QUAN |
|---|






