Успешно разработана роботизированная рука для хирургии и дистанционного разминирования
После проектирования и тестирования, а также совершенствования алгоритмов управления, реальные результаты испытаний роботизированной руки оказались весьма впечатляющими.
Департамент науки и технологий (DOST) города Хошимин принял проект «Исследование по разработке и производству модели робота, копирующего движение и силовую обратную связь», возглавляемый магистром наук Нгуеном Нгок Дьепом, преподавателем факультета машиностроения Хошиминского промышленного университета.
Проблемы с рукой робота
Одним из важных аспектов вводной сессии по теме является возможность удалённого управления роботизированной рукой. Другими словами, как синхронизировать «чувства» вторичной (ведомой, непосредственно взаимодействующей с объектом) руки робота с основной (ведущей, управляемой человеком) рукой.
 |
| Проблемы с рукой робота |
Дистанционное управление — неотъемлемая часть Индустрии 4.0. Рабочие и инженеры могут управлять оборудованием, находясь на расстоянии десятков или сотен метров, без необходимости непосредственного взаимодействия с производственной линией.
Цель этого, помимо экономии средств и времени на поездку, также способствует минимизации рисков для производителей, если рабочая среда является высокоопасной (содержит токсины, радиацию, небезопасные условия труда и т. д.).
В настоящее время дистанционное управление применяется во многих областях, таких как дистанционная хирургия, разминирование... и даже управление роботами для исследования Марса.
Однако точное управление пультом дистанционного управления, чтобы он работал так, как нужно оператору, — задача не из простых. Если оператор не знает, что ведомая рука перегружена, и продолжает подавать команду на нажатие, это может привести к её повреждению.
Кроме того, задержка сигнала, отклонение момента, предварительное напряжение... все должно быть на самом низком уровне.
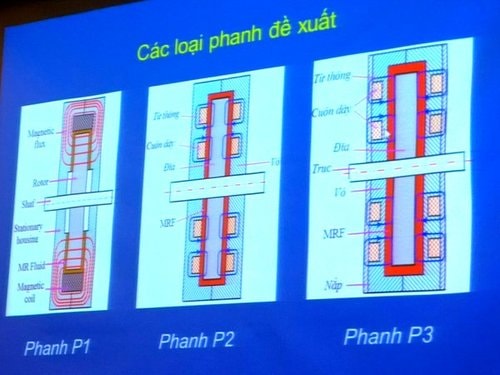 |
| Структура 3-х моделей тормозов MRF от Master Diep. |
Решением вышеперечисленных проблем является тормозная система, управляющая движением каждой руки. Это также является основной темой исследования, над которым работал Мастер Дьеп: разработать, разработать и изготовить подходящий тип тормоза для использования в роботизированной руке.
Решение для торможения, выбранное магистром наук Дьепом, называется MRF. MRF (магнитореологическая жидкость) — это особый тип жидкости, вязкость которой изменяется при изменении проходящего через неё магнитного поля. При достаточной напряжённости магнитного поля MRF практически затвердевает и может использоваться в качестве тормоза для механических деталей.
Согласно предложению Мастера Дипа, существуют три модели тормозов MRF, которые можно использовать для создания роботизированных рук: P1, P2 и P3. У P1 магнитная катушка расположена в верхней части тормозного диска, у P2 катушка расположена внутри диска с двух сторон, а у P3 катушка расположена снаружи диска с двух сторон.
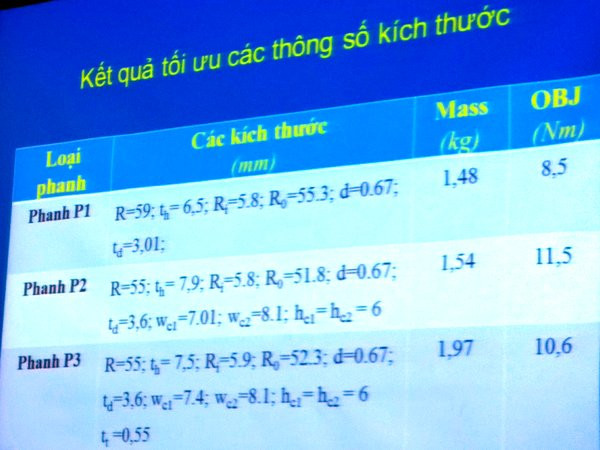 |
| Тормоза P2 и P3 имеют наилучшую производительность, соответствующую целевому показателю (> 10 Нм). |
Результаты компьютерного моделирования и эксперимента Мастера Дьепа показывают, что, несмотря на лёгкость тормоза P1, он обладает наименьшей эффективностью (Нм). Модели P2 и P3 тяжелее, но обладают эффективностью, соответствующей реальным потребностям.
Стоит отметить, что, хотя тормоз P2 обладает лучшим соотношением производительности и веса, из-за расположения катушки внутри его ремонт и обслуживание сложнее. Поэтому магистр наук Дьеп выбрал тормоз P3, поскольку он сочетает в себе стоимость и производительность.
Проектирование и производство
Выбор тормоза — это только первая часть проблемы. Следующая проблема — как спроектировать руку робота, какой материал выбрать, датчик угла, датчик момента, управляющий чип... Магистр наук Диеп рассказал, что система «ведущий-ведомый» руки робота представляет собой систему с тремя степенями свободы (три оси вращения) с максимальной нагрузкой 2,5 кг. Диапазон рабочего диапазона руки ведомого устройства составляет 0–270° по оси 1, 0–100° по оси 2 и 0–180° по оси 3, максимальный вылет составляет 0,7 метра, а максимальная скорость в конечной точке — 0,5 м/с.
В целях экономии средств мастер-манипулятор был повторно использован из «корпуса» манипулятора Fanuc LR 100i. Магистр наук отметил, что «повторно использовался только корпус», а все остальные компоненты (датчики, тормоза, энкодеры) были разработаны и установлены заново исследовательской группой.
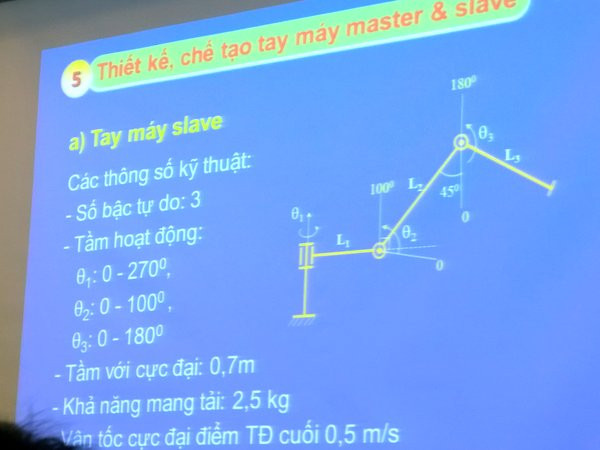 |
| Структура манипулятора ведомого робота, разработанная магистром наук Диепом |
Наконец, необходима система управления «транслятором», чтобы обе руки «понимали друг друга». Система, предложенная исследовательской группой Master Diep, включает в себя 3 датчика угла LBJ-096-2000, 2 трёхмерных датчика силы OMD 30EF и 3 датчика крутящего момента AZM 350. Система также включает 3 устройства управления тормозами, 3 серводвигателя HC-KFS 23 переменного тока и платы управления NI PCI 6289, 6225 для измерения входных/выходных сигналов на каждой руке.
Впечатляющие результаты
После проектирования и тестирования, а также совершенствования алгоритмов управления, реальные результаты испытаний роботизированной руки оказались весьма впечатляющими.
Совет по приемке проекта Министерства науки и технологий собственными глазами наблюдал практически бесперебойную работу пары манипуляторов, изображенных наверху.
 |
 |
Движения, управляемые ведомой рукой, точно воспроизводятся на ведущей руке. Испытание на «ощущение» натяжения также проводится с использованием имитационных пружин, установленных во всех трёх направлениях: горизонтальном, вертикальном и диагональном.
Можно сказать, что группа мастера Дьепа полностью преуспела в создании роботизированной руки третьего порядка по силовой обратной связи.
 |
| Эксперименты с силовой обратной связью во всех трех направлениях: горизонтальном, вертикальном и диагональном дали хорошие результаты. |
В качестве дальнейшей цели магистр наук Дьеп предложил Министерству науки и технологий разрешить группе увеличить количество степеней свободы до уровня 5 (DOF), что позволит руке выполнять более сложные операции.
Группа также надеется получить больше инвестиций для применения более интеллектуальных алгоритмов, добавления активной обратной связи, объединения MRF с пневматическими устройствами обратной связи для дальнейшего расширения применимости, особенно в медицинской сфере, где требуется возможность имитировать ощущения кожи пациента почти реалистично.
По данным Discovery
| СВЯЗАННЫЕ НОВОСТИ |
|---|






