成功设计用于手术和远程扫雷的机械臂
经过设计和测试,完善控制算法后,机械臂的实际测试结果非常令人印象深刻。
胡志明市科技部已接受由胡志明市工业大学机械工程学院讲师阮玉叶硕士领导的“复制运动和力反馈机器人模型设计和制造研究”项目。
机械臂问题
该课题验收环节中的一个重要内容就是能否远程控制这个机械臂。或者说,如何将副机械臂(从臂,直接与物体交互)的“感觉”与主机械臂(主臂,由人控制)同步。
 |
| 机械臂问题 |
远程控制是工业4.0不可或缺的一部分,工人或工程师无需直接与生产线交互,而是可以在几十米甚至几百米之外控制设备。
这样做的目的除了节省成本和旅行时间之外,还有助于在工作环境高度危险(含有毒素、辐射、不安全的劳动安全……)的情况下最大限度地降低生产商的风险。
如今,远程控制已经应用在很多领域,比如远程手术、扫雷工程……甚至控制机器人去火星研究。
然而,要能够精准地控制遥控器,按照操作人员的意愿进行操作,并不是一件简单的事情。如果操作人员不知道从动臂已经超载,而继续下达下压指令,则可能会对从动臂造成损坏。
另外,信号延迟、力矩偏差、预应力……都必须处于最低水平。
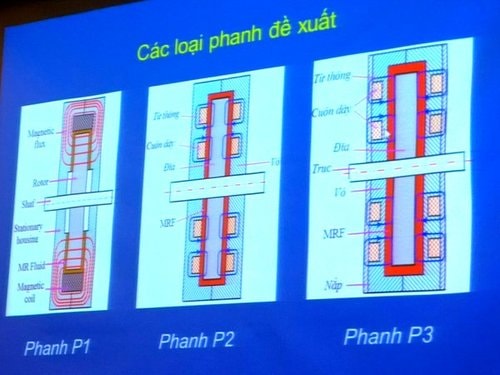 |
| Diep 大师设计的 3 种 MRF 制动器模型的结构。 |
为了解决上述问题,一个用于控制每个机械臂运动的制动系统就是答案。这也是叶大师着手解决的研究课题的主要内容——研究、设计和制造一种适用于机械臂的制动器。
叶普选择的制动解决方案名为MRF。MRF(磁流变液)是一种特殊的液体,当穿过它的磁场发生变化时,其粘度会发生变化。在足够的磁场强度下,MRF几乎会凝固,可以用作机械部件的制动器。
根据叶师傅的方案,可用于制作机械臂的磁流变液(MRF)刹车型号有3种,分别为P1、P2和P3。其中,P1的电磁线圈位于刹车盘的上方,P2的线圈位于刹车盘的两侧内侧,P3的线圈位于刹车盘的两侧外侧。
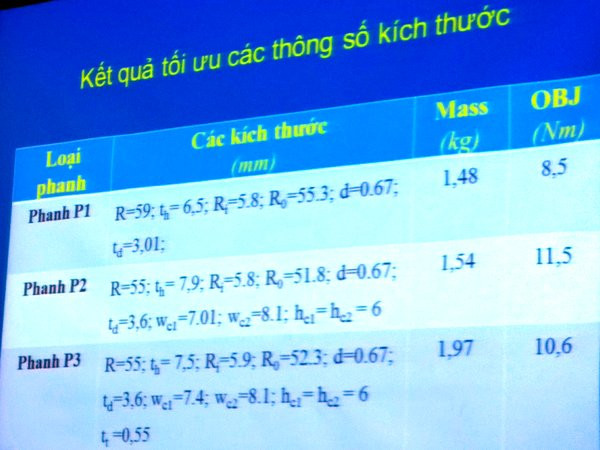 |
| P2、P3制动器性能最佳,达到设计目标(>10Nm)。 |
计算机模拟结果以及叶师傅的实验结果显示,P1型制动器虽然重量轻,但效率(Nm)最低,P2、P3两款制动器重量较重,但效率可以满足实际需求。
需要注意的是,虽然P2刹车拥有最佳的性能/重量比,但由于线圈位于内部,维修和保养会更加复杂。因此,MSc. Diep选择了P3刹车,因为它在成本和性能之间取得了平衡。
设计和制造
选择刹车只是问题的第一部分。接下来的问题是如何设计机械臂,选择什么材料、角度传感器、力矩传感器、控制芯片……叶硕士介绍说,主从机械臂系统是一个3自由度系统(3个旋转轴),最大负载为2.5公斤。其中,从动臂的工作范围为轴1角度0-270°,轴2角度0-100°,轴3角度0-180°,最大工作半径0.7米,终点最大速度0.5米/秒。
为了节省成本,主臂从Fanuc LR 100i机械臂的“本体”中重复使用。该硕士生表示,只有主臂外壳被“重复使用”,其余部件(传感器、制动器、编码器)均由研究团队重新设计并安装。
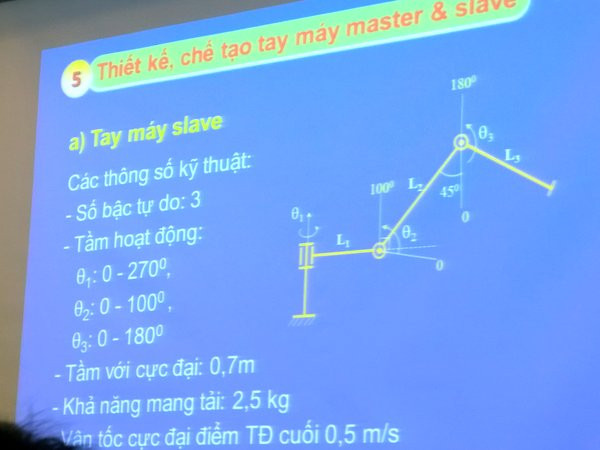 |
| MSc. Diep 设计的从属机械臂结构 |
最后,需要一个“翻译器”控制系统,使两个手臂能够“互相理解”。该系统由 Master Diep 的研究小组提出,包括 3 个 LBJ-096-2000 角度测量编码器、2 个 OMD 30EF 三维力传感器和 3 个 AZM 350 扭矩传感器。该系统还包含 3 个制动控制装置、3 个 HC-KFS 23 交流伺服电机以及 NI PCI 6289、6225 控制卡,用于测量每个手臂的输入/输出信号。
令人印象深刻的结果
经过设计和测试,完善控制算法后,机械臂的实际测试结果非常令人印象深刻。
科技部项目验收委员会亲眼目睹了上面那对机械臂几乎无故障地运转。
 |
 |
从动臂控制的运动在主动臂上精确再现。此外,还通过安装在水平、垂直和对角线三个方向的模拟弹簧来测试张力的“感觉”。
可以说,叶大师团队已经完全成功地创造了力反馈三阶机械臂。
 |
| 水平、垂直和对角线三个方向的力反馈实验都取得了良好的效果。 |
对于更进一步的目标,MSc. Diep 建议科技部允许该小组将自由度数增加到 5 级 (DOF),从而使手臂能够执行更复杂的操作。
该团队还希望获得更多投资,以应用更智能的算法,添加主动反馈,将MRF与气动反馈装置相结合,进一步增强适用性,特别是在医疗领域,这需要能够近乎逼真地模拟患者皮肤的感觉。
据《探索》杂志报道
| 相关新闻 |
|---|






