Bras robotisé conçu avec succès pour la chirurgie et le déminage à distance
Après avoir conçu et testé, perfectionné les algorithmes de contrôle, les résultats réels des tests du bras robotique ont été très impressionnants.
Le Département des Sciences et Technologies (DOST) de Hô-Chi-Minh-Ville a accepté le projet « Recherche sur la conception et la fabrication d'un modèle de robot reproduisant le mouvement et le retour de force », dirigé par Nguyen Ngoc Diep, maître de conférences à la Faculté de génie mécanique de l'Université d'Industrie de Hô-Chi-Minh-Ville.
Problèmes de bras de robot
L'un des points importants de la session d'acceptation du sujet est la capacité à contrôler à distance ce bras robotique. Autrement dit, comment synchroniser la « sensibilité » du bras robotique secondaire (esclave, interagissant directement avec l'objet) avec celle du bras principal (maître, contrôlé par l'utilisateur).
 |
| Problèmes de bras de robot |
Le contrôle à distance est un élément indispensable de l'Industrie 4.0. Ainsi, les ouvriers ou les ingénieurs n'ont plus besoin d'interagir directement avec la chaîne de production, mais peuvent se trouver à des dizaines, voire des centaines de mètres de distance pour contrôler les équipements.
L'objectif de ceci, en plus d'économiser les coûts et le temps de déplacement, contribue également à minimiser les risques pour les producteurs si l'environnement de travail est hautement dangereux (contient des toxines, des radiations, des conditions de travail dangereuses...).
De nos jours, la télécommande a été appliquée dans de nombreux domaines tels que la chirurgie à distance, le déminage... et même le contrôle de robots pour la recherche sur Mars.
Cependant, contrôler la télécommande avec précision et l'utiliser comme souhaité par l'opérateur n'est pas chose aisée. Si l'opérateur ignore que le bras esclave est surchargé et continue d'appuyer, il risque de l'endommager.
De plus, le retard du signal, la déviation du moment, la précontrainte... doivent tous être au niveau le plus bas.
 |
| Structure de 3 modèles de freins MRF par Master Diep. |
Pour résoudre ces problèmes, un système de freinage permettant de contrôler le mouvement de chaque bras constitue la solution. C'est également l'objet principal du sujet de recherche que Maître Diep s'est fixé : étudier, concevoir et fabriquer un type de frein adapté à un bras robotisé.
La solution de freinage choisie par le maître Diep s'appelle MRF. Le MRF (fluide magnétorhéologique) est un liquide particulier dont la viscosité varie en fonction du champ magnétique qui le traverse. À une intensité de champ magnétique suffisante, le MRF se solidifie presque complètement et peut servir de frein pour les pièces mécaniques.
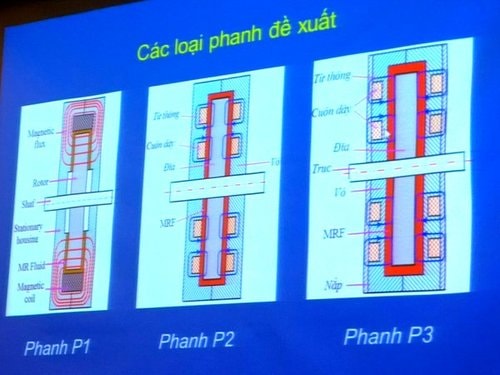
Selon la proposition de Maître Diep, trois modèles de freins MRF peuvent être utilisés pour la fabrication de bras robotisés : les freins P1, P2 et P3. P1 possède une bobine magnétique située au sommet du disque de frein, P2 une bobine placée à l'intérieur de chaque côté du disque, et P3 une bobine placée à l'extérieur de chaque côté du disque.
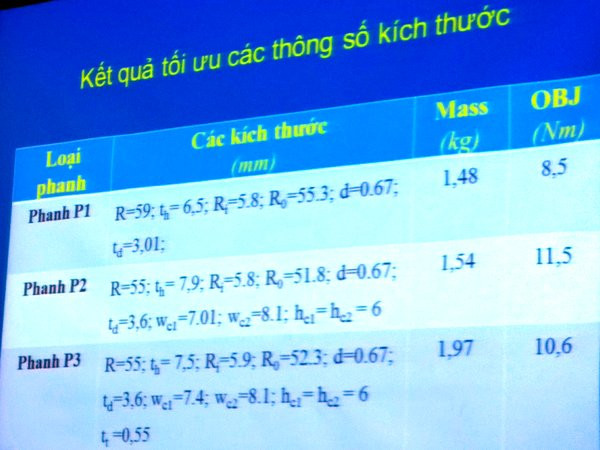 |
| Les freins P2 et P3 présentent les meilleures performances, répondant à l'objectif de conception (> 10 Nm). |
Les résultats de la simulation informatique ainsi que l'expérience de Maître Diep montrent que, bien que le frein P1 soit léger, son rendement (Nm) est le plus faible. Les deux modèles P2 et P3 sont plus lourds, mais leur rendement répond aux besoins réels.
Il est important de noter que, bien que le frein P2 offre le meilleur rapport performances/poids, la bobine étant intégrée, sa réparation et son entretien sont plus complexes. C'est pourquoi le MSc. Diep a choisi le frein P3, car il offre un excellent rapport coût/performance.
Conception et fabrication
Le choix du frein n'est que la première étape du problème. La question suivante concerne la conception du bras robotique : quel matériau choisir, quel capteur d'angle, quel capteur de moment, quel circuit de commande… Diep, MSc, explique que le système de bras robotique maître-esclave est un système à 3 degrés de liberté (3 axes de rotation), avec une charge maximale de 2,5 kg. Le bras esclave a une plage de fonctionnement de 0 à 270 ° pour l'axe 1, de 0 à 100 ° pour l'axe 2 et de 0 à 180 ° pour l'axe 3, une portée maximale de 0,7 mètre et une vitesse maximale au point final de 0,5 m/s.
Pour réduire les coûts, le bras maître a été réutilisé à partir du « corps » du bras Fanuc LR 100i. Le master a précisé que seule la coque maître avait été « réutilisée », les composants restants (capteurs, freins, codeurs) ayant été conçus et installés par l'équipe de recherche.
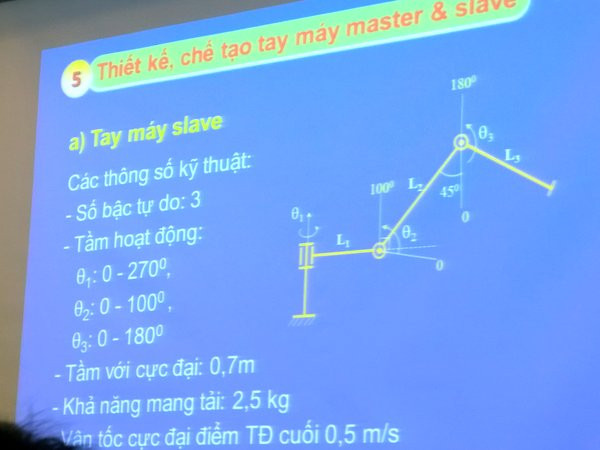 |
| Structure du bras robotique esclave par MSc. Diep |
Enfin, un système de contrôle par « traducteur » est nécessaire pour que les deux bras puissent se comprendre. Ce système, proposé par le groupe de recherche de Master Diep, comprend trois codeurs d'angle LBJ-096-2000, deux capteurs de force tridimensionnels OMD 30EF et trois capteurs de couple AZM 350. Il comprend également trois dispositifs de commande de frein, trois moteurs HC-KFS 23 comme servomoteurs CA et des cartes de contrôle NI PCI 6289 et 6225 pour mesurer les signaux d'entrée/sortie de chaque bras.
Des résultats impressionnants
Après avoir conçu et testé, perfectionné les algorithmes de contrôle, les résultats réels des tests du bras robotique ont été très impressionnants.
Le comité d'acceptation du projet du Département des sciences et de la technologie a pu constater de ses propres yeux le fonctionnement presque sans problème de la paire de bras ci-dessus.
 |
 |
Les mouvements contrôlés par le bras esclave sont reproduits à l'identique sur le bras maître. Des tests de tension sont également effectués avec des ressorts simulés montés dans les trois directions : horizontale, verticale et diagonale.
On peut dire que le groupe de Maître Diep a complètement réussi à créer un bras robotique de troisième ordre en retour de force.
 |
| Les expériences de retour de force dans les trois directions horizontale, verticale et diagonale ont donné de bons résultats. |
Dans un autre objectif, MSc. Diep a proposé que le Département des sciences et de la technologie permette au groupe d'augmenter le nombre de degrés de liberté au niveau 5 (DOF), permettant au bras d'effectuer des opérations plus complexes.
L'équipe espère également recevoir davantage d'investissements pour appliquer des algorithmes plus intelligents, ajouter une rétroaction active, combiner le MRF avec des dispositifs de rétroaction pneumatique, afin d'améliorer encore l'applicabilité, en particulier dans le domaine médical, qui nécessite la capacité de simuler la sensation de la peau du patient de manière presque réaliste.
Selon Discovery
| NOUVELLES CONNEXES |
|---|






